The ideas we developed for the company Guerrilaz are listed below at this moment we are still waiting for the feedback of the company, although we already explained the concrete plans to build and produce some of these ideas.
Goodies:
• Indonesische hoed. Gebaseerd op de traditionele hoofddeksels die ze in Indonesië gebruiken. De link naar
de oorkomst van het merk komt hierin erg goed naar voren.
• Sjaal (2 gaten erin; kan aan elkaar geritst worden). Hierin komt de het groepsgevoel naar boven. De sjaal
kun je op twee verschillende manieren gebruiken, met vrienden om onder te zitten en warm te blijven of
om op te zitten tijdens de het festival zelf.
• (Chili- powered) beer cooler. Een add-on voor om de plastic bekers van festivals, die het bier langer koel
houdt dan normaal. Er kan eventueel gekeken worden naar een chemische reactie met chili die dit waar
zou kunnen maken. De link hier ligt bij het (langer) genieten van eten en drinken met go-tan.
• Peperhoedje. De bovenkant van een peper kan als hoedje fungeren; tegen de zon en de link naar chili door
de vorm.
Foto-acties (foto’s worden thuis gestuurd na opgeven adres via site):
• Mensen vanuit Go-Tan die rondlopen over het festival die foto’s maken
Door e-mail adressen te verzamelen bij de foto’s kan de begunstigde via zijn mail een invulformulier
ontvangen om de festival foto thuis te laten sturen. Dit wordt via mail gedaan om de eerste handeling zo
gemakkelijk mogelijk te houden(alleen een e-mail adres afgeven). De foto wordt thuis gestuurd in een
fotokader van Go-tan inclusief een kortingsbon en receptidee om met Go-tan producten te koken voor
een studentenhuis. Op deze manier is er ook een directe koppeling naar van communicatie naar de klant
toe, direct naar activatie om ook producten te kopen.
• Stand als bord, met opblaasbare attributen. Hoe gekker hoe beter (combinatie chili).
Door de foto’s met attributen erbij te nemen worden de festivalgangers meer uitgedaagd om gekkere
foto’s te nemen (die leuker zijn om te bewaren waardoor ze langer op de koelkast deur hangen). Ook
heeft hoe gekker hoe beter een link met chilisaus, het is de bedoeling om de Nederlanders chilisaus te laten
zien als een saus die je overal bij kunt gebruiken, pasta, tosti, aardappels etc. of terwijl hoe gekker hoe
beter!
• Chilimeter (ben je sweet of ben je hot)
Bij de chilimeter wordt ook een foto gemaakt maar hierbij wordt gemeten hoe gek je doet door de
chilimeter achterop de foto, ook hier geldt hoe gekker hoe beter! Hierdoor wordt ook hier het publiek
gestimuleerd om zo gek mogelijk te doen waardoor de foto’s leuker worden en er een grotere stimulus is
om de foto te gaan maken bij de stand en te bewaren.
Go-tan als merk geheel te promoten
• Kroepoek zitzakken
Fatboy’s met opdruk van de kroepoek zakken, het loungen op de zitzakken met Go-tan hapjes.
Stimuleert het samen zijn en samen genieten waar het merk voor staat.












 By switching the state of nearby EP magnets, the motor will step through various (rotational) configurations.Owing to the unique properties of EP magnets, this type of stepper motor offers some interesting benefits.
By switching the state of nearby EP magnets, the motor will step through various (rotational) configurations.Owing to the unique properties of EP magnets, this type of stepper motor offers some interesting benefits.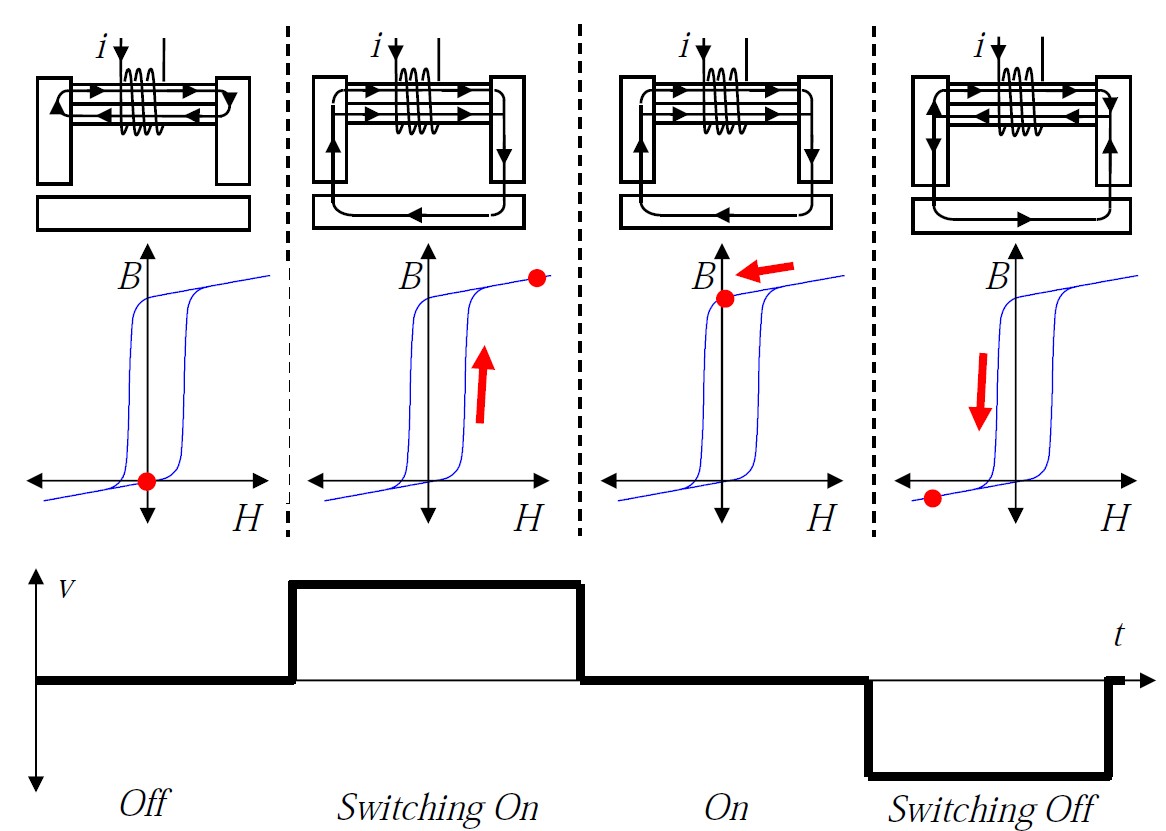








.JPG)
.JPG)

.JPG)

.JPG)
.JPG)
.JPG)

.JPG)














.JPG)
